Hot Spot Auto Selector

Product description
Specifications
Download
Fully automatic hot spot cells selector meet the hot spot test requirements specified in 4.9 clause of the IEC 61215-2016 standard.
l 3A light could be used to make the module generate current, and the irradiance could be adjusted automatically.
l Automatic robots grab the flaps and cover the cells in sequence.
l Using an industrial camera vision system to locate the cell.
l The X and Y axes of the grab could be adjusted automatically according to the position of the industrial camera.The cover sheet is placed to completely cover the cell.
l Three bypass diode cell strings are synchronously covered to select 3 strings simultaneous to improve efficiency;
l After covering the cell , the robot returns to its original position and does not influence irradiation.
l Adopt high-speed acquisition card to collect cell string current synchronously when transient light source is on.
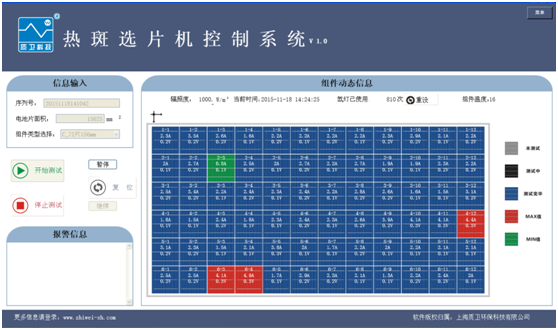
l The entire process can be controlled automatically by the IPC.
l Test data can be automatically stored in the EXCEL form.
Project | Parameters |
Spectral range | 400-1000nm |
Spectral matchin | Class A within the spectral range of 400nm-1100nm |
Irradiation non-uniformity | ≤2% Class A |
Irradiation instability | STI:≤0.5% Class A LTI:≤1% Class A |
Data repeatability | ≤±0.5% |
Irradiation area | 2000mm×1050mm; |
Light source life | ≥100000 times |
Current range | 0-2A |
Current resolution | 0.1A |
Current accuracy | 0. 5% |
Grab moving accuracy | 0.1mm |
Grab moving repeatability | 0.1mm |
Grab moving speed | ≥100mm/s |
Visual System Pixels | 800*600 |
Cell selection time | ≤30min(72 - piece battery pack) |
- File name Release date Ooperating
- IEC 61215-2016 2018-04-16 Download